Projects
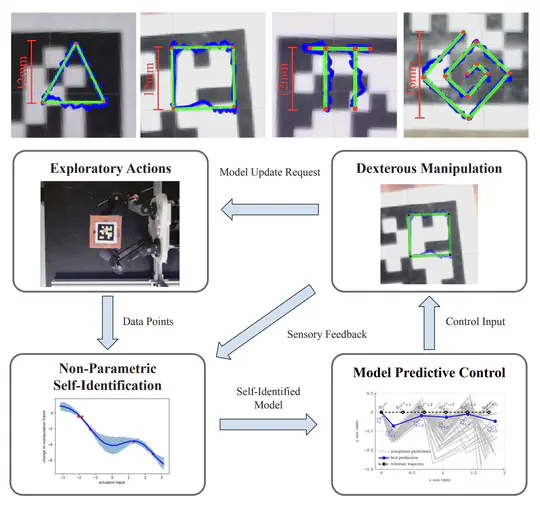
Combining modern state estimation techniques with specialized adaptable robot hardware to enable online discovery and updating of manipulation “controllers” that require minimal sensing and are highly robust to uncertainty.
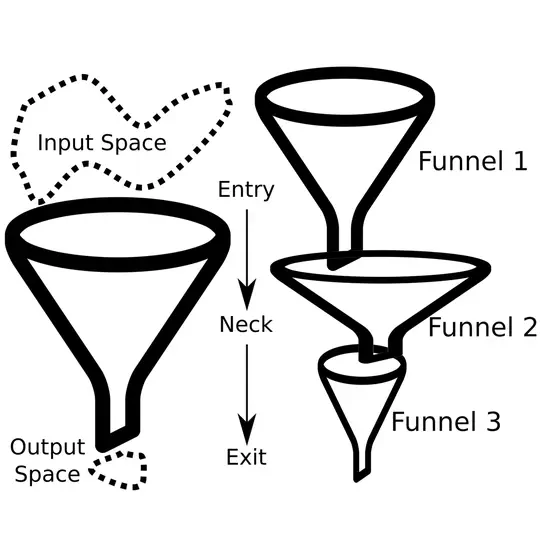
We investigate “manipulation funnels”, which effectively converge complex manipulation states towards strictly smaller subsets, to provide robust manipulation against various uncertainties, as well as creating new manipulation possibilities that were traditionally infeasible.
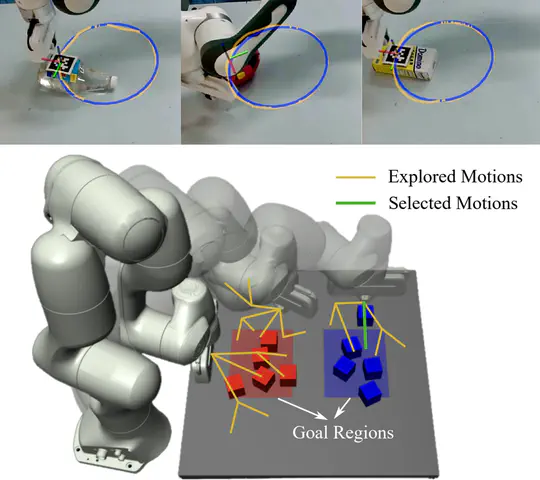
Enabling multi-modal robot nonprehensile manipulation by concurrently building multiple motion trees and adaptively switching between them.
Dexterous in-hand manipulation without lifting a finger using a class of novel compliant robot hands featured by active surfaces.
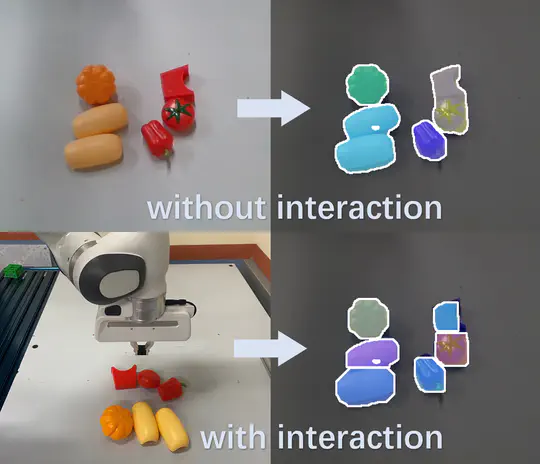
Improving the robot capability of object visual understanding by shifting the traditional robot perception paradigm from “wait-to-observe” to “seek-to-observe” through closing the loop between uncertainty-aware perception and robot exploratory manipulation.