Interactive Object Perception
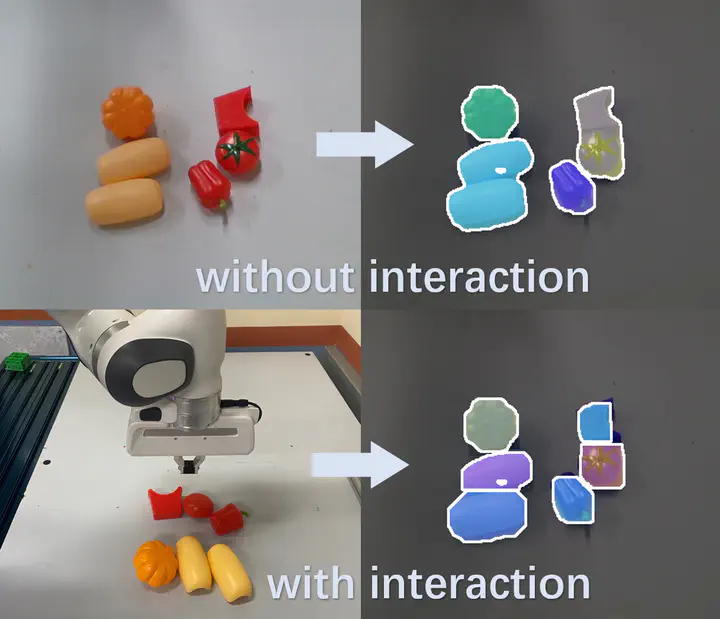
Improving the robot capability of object visual understanding by shifting the traditional robot perception paradigm from “wait-to-observe” to “seek-to-observe” through closing the loop between uncertainty-aware perception and robot exploratory manipulation.