Active Surface-based Compliant Robot Hands
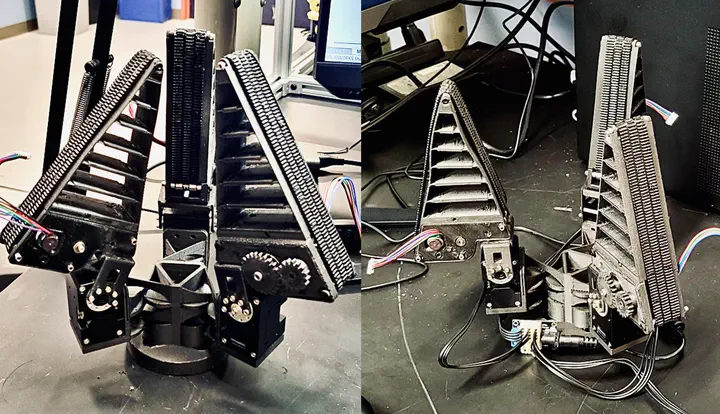
Dexterous in-hand manipulation without lifting a finger using a class of novel compliant robot hands featured by active surfaces.
Dexterous in-hand manipulation without lifting a finger using a class of novel compliant robot hands featured by active surfaces.