Self-Identification for Robot Manipulation under Uncertainty Aided by Passive Adaptability
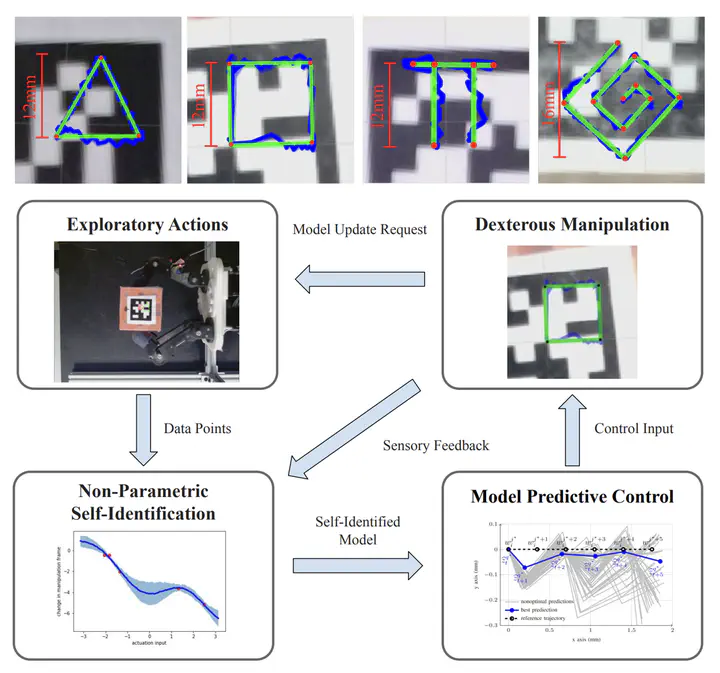
Combining modern state estimation techniques with specialized adaptable robot hardware to enable online discovery and updating of manipulation “controllers” that require minimal sensing and are highly robust to uncertainty.