Rice RobotΠ Lab
Rice RobotΠ Lab
Projects
News
People
Publications
Contact
Join
Light
Dark
Automatic
Rice Robot$\Pi$ Lab
where robots
P
hysically
I
nteract with the world
News
ManipulationNet released!
We are excited to announce ManipulationNet, a community-driven global infrastructure, that enables benchmarking robot manipulation research at scale with any robot at anytime and anywhere. Inspired by the prior efforts in benchmarking robot manipulation, including standard object sets paired with evaluation protocols, simulation-based benchmarking platforms, and onsite competitions in conferences, the ManipulationNet, for the first time, has simultaneously provided authenticity, accessibility, and realism in one online large-scale benchmarking system.
Oct 8, 2025
2 min read
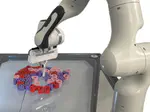
Our paper "Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation" has been accepted by TRO
Our paper “Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation” has been accepted by IEEE Transactions on Robotics (T-RO).
Sep 20, 2025
1 min read
Our paper "Collision-Inclusive Manipulation Planning for Occluded Object Grasping via Compliant Robot Motions" has been accepted by RA-L
Our paper “Collision-Inclusive Manipulation Planning for Occluded Object Grasping via Compliant Robot Motions” has been accepted by IEEE Robotics and Automation Letters (RA-L).
Jul 29, 2025
1 min read
5 papers accepted to IEEE/RSJ IROS 2025
We have 5 papers accepted to the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)! Our contributions cover the topics of robot interactive perception, autonomous markerless calibration, combined pick-motion-and-place planning, active surface-based end-effector design, and self-identification for in-hand manipulation.
Jun 26, 2025
1 min read
Ben Leebron has Been Awarded "Distinction in Research and Creative Works" by Rice University
We are proud to announce that our esteemed lab member, Ben Leebron, has been awarded the prestigious “Distinction in Research and Creative Works” by Rice University. This is a university honor for graduating students that will be granted at Commencement and will appear on recipients’ transcripts and diplomas.
May 5, 2025
1 min read
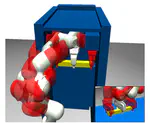
Our paper "Caging in Time, A Framework for Robust Object Manipulation under Uncertainties and Limited Robot Perception" has been accepted by IJRR
Our paper “Caging in Time: A Framework for Robust Object Manipulation under Uncertainties and Limited Robot Perception” has been accepted by International Journal of Robotics Research (IJRR).
May 1, 2025
1 min read
See all posts
Cite
×