Exploring Robust Robot Manipulation through Compliance-Based and Motion-based Manipulation Funnels
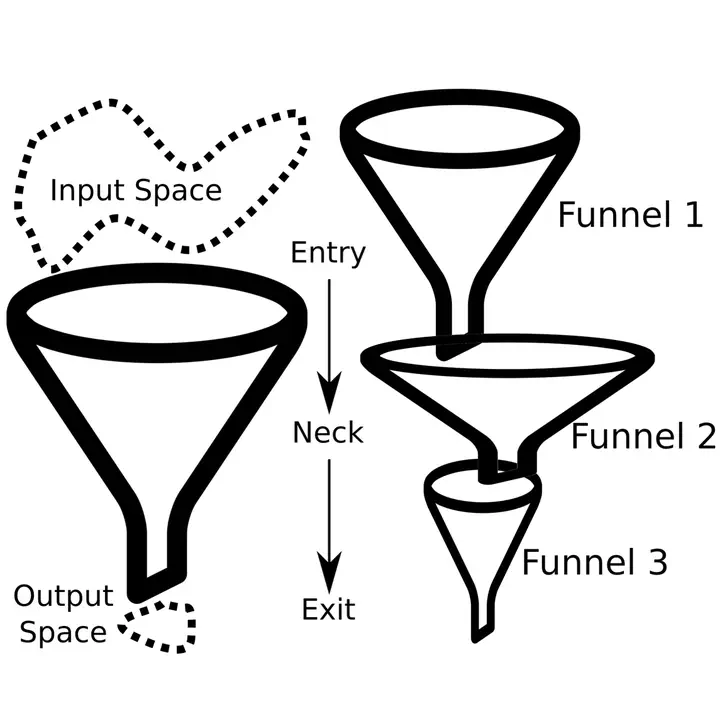
We investigate “manipulation funnels”, which effectively converge complex manipulation states towards strictly smaller subsets, to provide robust manipulation against various uncertainties, as well as creating new manipulation possibilities that were traditionally infeasible.
Kejia Ren
Graduate student in Computer Science
Gaotian Wang
Graduate student in Computer Science
My research interests include nonprehensile manipulation, Large Language Models and Task-skill planning.