Nonprehensile Manipulation through Forest-based Planning with Dynamic Planning Horizons
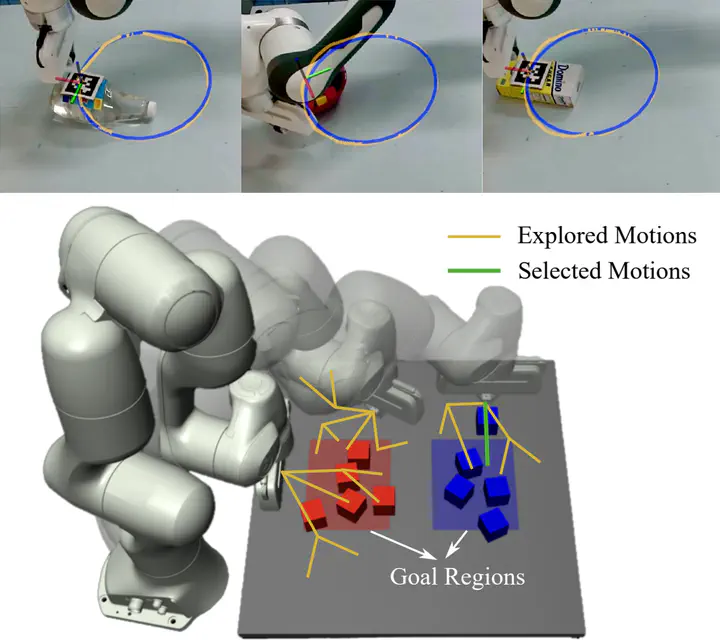
Enabling multi-modal robot nonprehensile manipulation by concurrently building multiple motion trees and adaptively switching between them.
Kejia Ren
Graduate student in Computer Science
Gaotian Wang
Graduate student in Computer Science
My research interests include nonprehensile manipulation, Large Language Models and Task-skill planning.