Our Paper "UNO Push, Unified Nonprehensile Object Pushing via Non-Parametric Estimation and Model Predictive Control" has been accepted by IEEE/RSJ IROS 2024
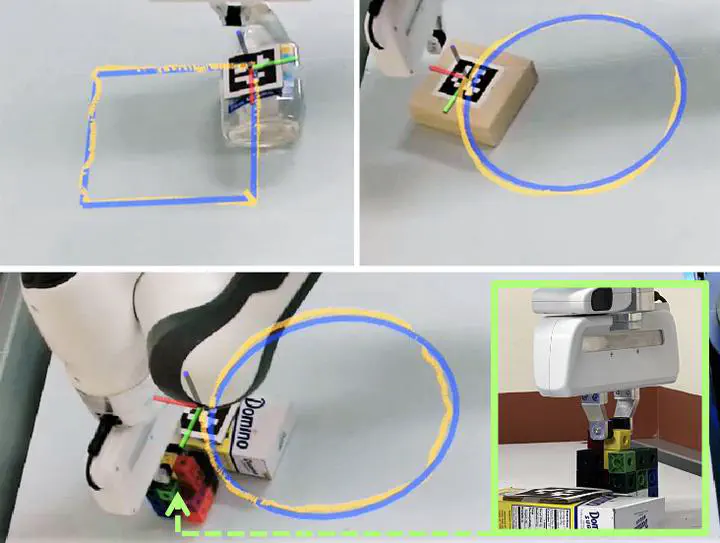
Our paper “UNO Push: Unified Nonprehensile Object Pushing via Non-Parametric Estimation and Model Predictive Control” has been accepted by IEEE/RSJ IEEE International Conference on Intelligent Robots and Systems (IEEE/RSJ IROS) 2024. Check out the video!