Our paper "Robust Peg-in-Hole Assembly under Uncertainties via Compliant and Interactive Contact-Rich Manipulation" has been accepted by RSS 2025
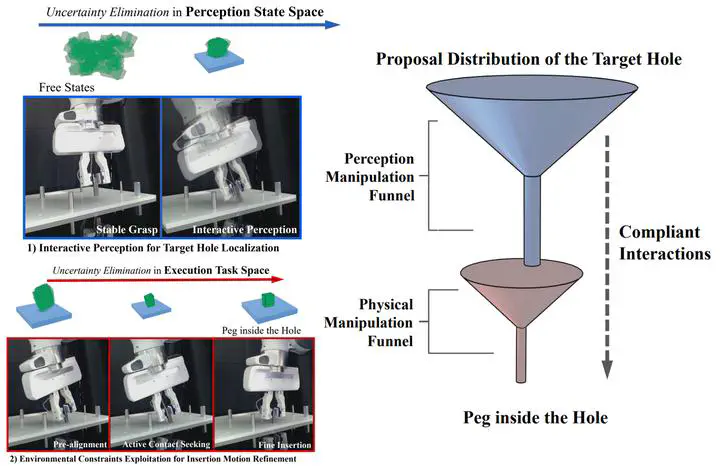
Our paper “Robust Peg-in-Hole Assembly under Uncertainties via Compliant and Interactive Contact-Rich Manipulation” has been accepted by Robotics: Science and Systems (RSS) 2025.