Our paper "Caging in Time, A Framework for Robust Object Manipulation under Uncertainties and Limited Robot Perception" has been accepted by IJRR
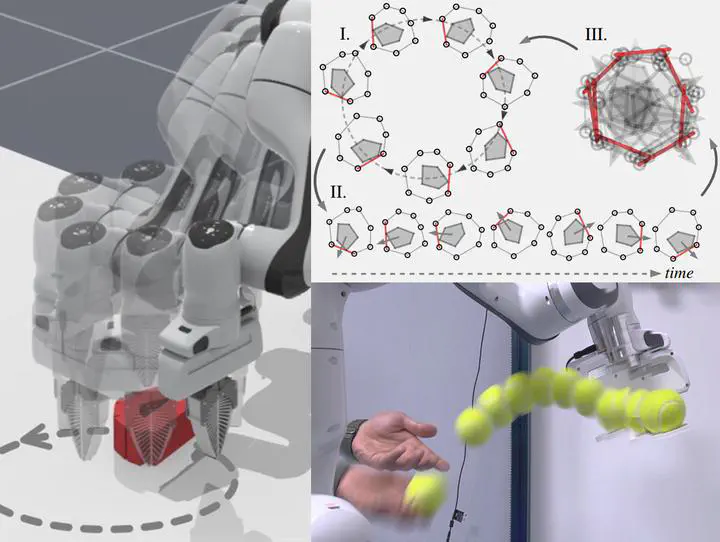
Our paper “Caging in Time: A Framework for Robust Object Manipulation under Uncertainties and Limited Robot Perception” has been accepted by International Journal of Robotics Research (IJRR).