Our Paper "Kinodynamic Rapidly-exploring Random Forest for Rearrangement-Based Nonprehensile Manipulation" has been accepted by IEEE-RAS ICRA 2023
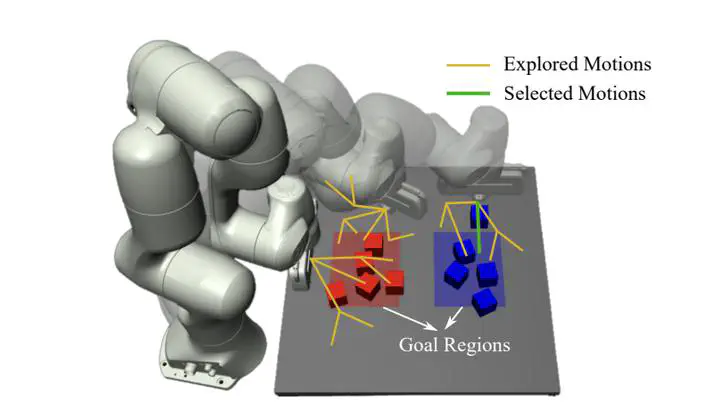
Our paper “Kinodynamic Rapidly-exploring Random Forest for Rearrangement-Based Nonprehensile Manipulation” has been accepted by IEEE-RAS International Conference on Robotics and Automation (IEEE-RAS ICRA). Check out the video!