Our Paper "Self-Supervised Unseen Object Instance Segmentation via Long-Term Robot Interaction" has been accepted by RSS 2023
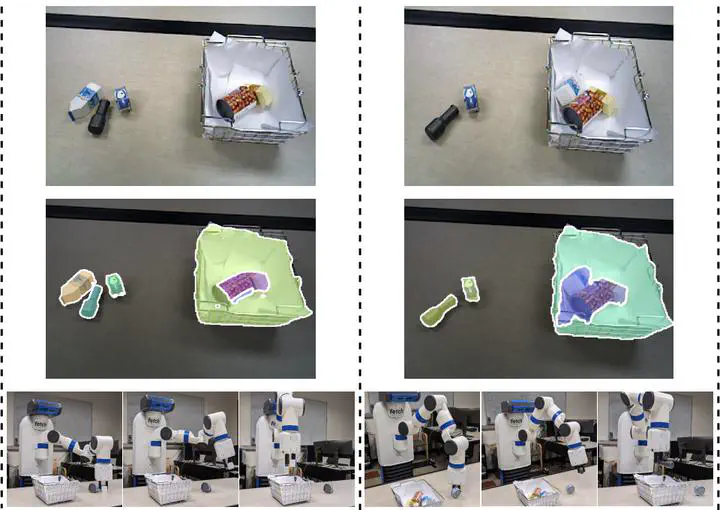
Our paper “Self-Supervised Unseen Object Instance Segmentation via Long-Term Robot Interaction” has been accepted by Robotics: Science and Systems (RSS 2023). Check out the video!